여러 입자의 운동
뉴턴의 프린키피아에서 태양, 지구 그리고 달의 세 천체에 대한 궤도를 그리는 문제로 시작한 삼체 문제(3-body problem)는 이후 앙리 푸앵카레에 의해 일반해가 불가능하다는 것을 증명할 때까지 많은 사람들이 빠져들었던 난제 중 하나였습니다.
여기서는 삼체문제를 확장하여 중력을 주고받는 N개의 입자가 어떤 궤도를 그리는지 알아내기 위해 벌렛(verlet) 방법을 사용합니다.
다체문제
N개의 입자가 중력을 주고받는 상황에서 각 입자가 그리는 궤적을 추적합니다. 벌렛 방법으로 기술하는 각 입자의 운동방정식은 이렇게 쓰입니다.
\[\begin{align} x(t_{i+1}) &= x(t_i) + v(t_i)h + \frac{1}{2} a(t_i)h^2 \\ v(t_{i+1}) &= v(t) + \frac{a(t_{i+1}) + a(t_i)}{2} h \end{align} \\ h = t_{i+1} - t_i\]벌렛 방법은 아래 과정을 거칩니다.
- $ t_0 = 0 $일 때의 초기값 $ x(0) $과 $ v(0) $, 시간 간격 $ h $를 설정합니다.
- $ t_1 = t_0 + h $ 일 때의 식 (1)을 풀어 $x_1$을 얻습니다.
- 새로운 위치 $x_1$으로부터 $ a(t_1) $을 구합니다.
- 앞서 구한 $ a(t_1) $를 이용해 식(2)를 풀어 저장합니다.
- $ t_i $의 $ i $를 증가시키면서 원하는 만큼 2~4를 반복합니다.
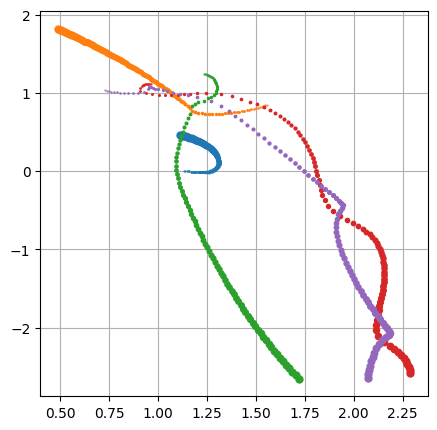
그림은 5개의 입자가 무작위로 배치된 뒤, 무작위의 속도를 가지고 운동하는 궤적을 그린 것입니다.
위치와 속도의 점화식
1
2
3
4
5
def verlet_x(x, v, a):
"""위치 점화식"""
dx = v * h + 0.5 * a * h ** 2
return x + dx
1
2
3
4
def verlet_v(v, a):
"""속도 점화식"""
dv = a * h
return v + dv
두 함수는 각각 벌렛 절차에 사용하는 $ x(t_{i+1}) $과 $ v(t_{i+1}) $입니다.
주고받는 중력으로부터 가속 계산
1
2
3
4
5
6
7
def acceleration(xy1, xy2, m2):
"""중력을 계산하고 가속도로 출력"""
r_sq = (xy2[0] - xy1[0]) ** 2 + (xy2[1] - xy1[1]) ** 2
theta = np.arctan2(xy2[1] - xy1[1], xy2[0] - xy1[0])
force = m2 / r_sq
return np.array([force * np.cos(theta), force * np.sin(theta)])
이 함수는 두 입자 사이의 힘과 가속도를 계산합니다. 영향을 받는 입자의 위치 xy1과 영향을 주는 입자의 위치 xy2는 np.array([x, y])형태의 벡터입니다.
입자 1과 입자 n사이의 중력으로 인한 가속는 다음과 같고,
\[a_n(\vec {r}_1, \vec {r}_n, t_{i+1}) = - \frac {m_n (\vec {r}_{1} - \vec {r}_{n}) } {|\vec {r}_{1} - \vec {r}_{n}|^3}\]이 식이 acceleration()함수와 같은역할을 합니다. 벌렛 모사에 필요한 입자 1에 작용하는 총 가속도는 이렇게 쓸 수 있습니다.
벌렛으로 궤도 구하기
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
def particle_motion(time, pos=[], vel=[], mass=[]):
"""벌렛 방법으로 입자의 궤도를 작성"""
# 위치와 속도 배열 초기화
pos_arr, vel_arr = [], []
for _pos, _vel in zip(pos, vel):
vel_arr.append(np.zeros([time.shape[0], 2]))
pos_arr.append(np.zeros([time.shape[0], 2]))
pos_arr[-1][0, :] = _pos
vel_arr[-1][0, :] = _vel
# 운동 배열 채우기
# idx는 t_n의 n을 의미
for idx in range(1, time.shape[0]):
# num: 입자 번호, pos: 입자 위치, vel: 입자 속도
for num, pos, vel in zip(range(len(pos_arr)), pos_arr, vel_arr):
# acc0: 움직이기 전 가속도
acc0 = np.zeros(2)
for pidx in [i for i in range(len(pos_arr)) if i != num]:
m2 = mass[pidx]
xy1 = pos[idx - 1]
xy2 = pos_arr[pidx][idx - 1]
acc0 += acceleration(xy1, xy2, m2)
pos[idx, :] = verlet_x(pos[idx - 1], vel[idx - 1], acc0)
# acc1: 움직인 후의 가속도
acc1 = np.zeros(2)
for pidx in [i for i in range(len(pos_arr)) if i != num]:
m2 = mass[pidx]
xy1 = pos[idx]
xy2 = pos_arr[pidx][idx]
acc1 += acceleration(xy1, xy2, m2)
vel[idx, :] = verlet_v(vel[idx - 1], (acc0 + acc1) / 2)
return pos_arr
particle_motion 함수는 벌렛 모사를 실행하는 부분입니다. 함수는 아래 과정을 재현하고 있습니다.
- $ t_0 = 0 $일 때의 초기값 $ x(0) $과 $ v(0) $, 시간 간격 $ h $를 설정합니다.
- $ t_1 = t_0 + h $ 일 때의 식 (1)을 풀어 $x_1$을 얻습니다.
- 새로운 위치 $x_1$으로부터 $ a(t_1) $을 구합니다.
- 앞서 구한 $ a(t_1) $를 이용해 식(2)를 풀어 저장합니다.
- $ t_i $의 $ i $를 증가시키면서 원하는 만큼 2~4를 반복합니다.
과제: 지구, 달, 태양의 궤적 모사하기
지구와 태양, 달이 있을 때 한 순간의 위치와 속도를 대입하고 각각의 질량을 초기화변수에 두어 위의 벌렛 알고리즘을 실행합니다. 단, 위의 acceleration()의 force변수에는 중력 상수를 적용하지 않았으므로 이를 수정한 뒤 시행해야 합니다.